LightSail objectives.
Solar sails use the sun’s energy as a method of propulsion—flight by light. Light is made of packets of energy called photons. While photons have no mass, a photon traveling as a packet of light has energy and momentum.
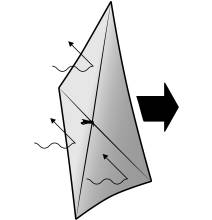
Solar sail spacecraft capture light momentum with large, lightweight mirrored surfaces—sails. As light reflects off a sail, most of its momentum is transferred, pushing on the sail. The resulting acceleration is small, but continuous. Unlike chemical rockets that provide short bursts of thrust, solar sails thrust continuously and can reach higher speeds over time.

Demonstrate feasibility of solar sailing from 3U CubeSat in Earth orbit and Serve as pathfinder for future solar sail missions. LightSail-A will launch in 2015 on Atlas 5 and LightSail-B in 2015 on Falcon Heavy.
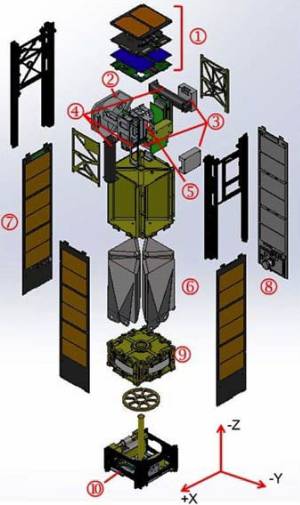
- Avionics
- Momentum Wheel Mass
- Gyros
- Torque Rods
- Battery Module
- Stowed Solar Sail
- Solar Panel
- Cameras
- Sail Deployer
- Antenna
Avionics: Torque rods, momentum wheel, circuit boards.
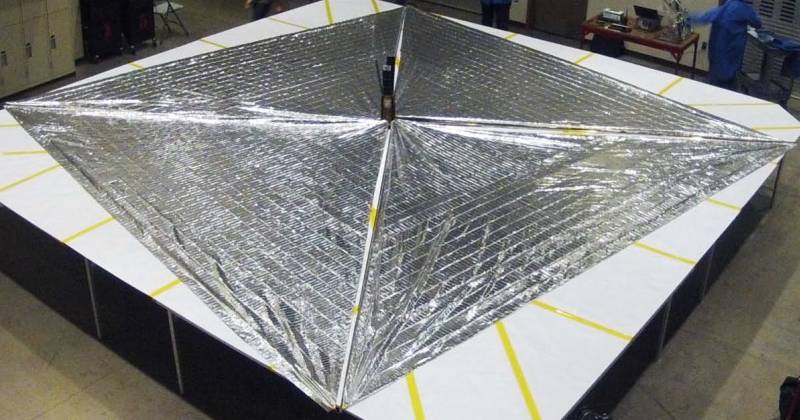
Sail storage: Four Mylar sails, 32 square meters total.
Boom storage: Four triangular Roll-able and Collapsible (TRAC) booms-the ‘tape measures’.
Payload: Boom deployment motor, antenna.
LightSail-A spacecraft fully deployed. The Sail area is 32 m², Four 4m booms 5.6m on a side.
TLE (Two line Elements)
LIGHTSAIL-A 1 90726U 15152.53796228 +.00011977 +00000-0 +32335-3 0 00175 2 90726 055.0066 288.5747 0249604 210.9055 247.9006 15.12492924001802
 Downlink
Downlink
437.435 MHz FM 9600bps FSK
Call
KK6HIT
Telemetry
2015-06-02 11:17:36.990 UTC: from KK6HIT-1 to N6CP-X (UI, payload: 248 byte) 000 > 00 9C 6C 86 A0 5A B0 00 96 96 6C 90 92 A8 03 03 CC 45 00 00 020 > F8 00 00 40 00 40 11 11 2D 81 41 93 21 81 41 93 24 C3 50 C6 040 > 70 00 E4 63 74 02 00 00 B6 41 00 00 BE 41 00 00 00 00 00 00 060 > 00 00 00 81 85 40 AE 7F 57 3D 81 EB 51 40 80 10 49 3D C0 4F 080 > 9D 40 F4 37 91 3E 4A 7E 44 3C 74 42 E8 B9 A8 01 03 3C EB FE 100 > 31 BB CC 0C 00 00 73 40 00 00 00 00 00 00 83 2F 00 00 02 00 120 > 00 00 00 00 00 00 01 00 00 00 37 0B 12 0D 01 B2 07 00 0D 20 140 > 0B 60 0B 20 0B E0 00 00 00 03 00 03 00 03 00 03 00 03 00 03 160 > 00 03 00 03 79 8C 6B 60 05 08 6B 60 04 D0 6B 80 08 50 6B 30 180 > 09 70 68 00 01 E0 6B 80 09 10 6B 60 0D 20 6B 70 0B E8 03 81 200 > FC 9E 00 E6 00 24 00 2F 00 2F 00 12 00 14 00 09 00 09 00 25 220 > 00 00 00 00 00 75 00 7C 01 59 01 8D 00 87 01 31 01 0A 00 39 240 > 01 2D 00 18 01 31 01 48 00 00 00 00 00 00 00 00 00 00 0F 00 260 > 40 00 00 80 40
Beacon description
struct RtcTime {
uint8_t sec;
uint8_t min;
uint8_t hr;
uint8_t day;
uint8_t month;
uint16_t year;
} __attribute__((packed));
struct extraCheese{
uint16_t camera0OnOff:1;
uint16_t camera1OnOff:1;
uint16_t sailStowedDeployed:1;
uint16_t motorOnOff:1;
uint16_t camera0RemainingPics:5;
uint16_t camera1RemainingPics:5;
uint16_t bangOnOff:1;
uint16_t sailDampingExecuted:1;
}__attribute__((packed));
struct LightSailABeaconFormat {
//Temperatures from the various temp sensors
float daughter_aTmp;
float daughter_bTmp;
float threeV_plTmp;
float rf_ampTmp;
// Readings from the various ina power sensors
float atmelPwrBusV;
float atmelPwrCurr;
float threeV_plPwrBusV;
float threeV_plPwrCurr;
float fiveV_plPwrBusV;
float fiveV_plPwrCurr;
float daughter_aPwrBusV;
float daughter_aPwrCurr;
float daughter_bPwrBusV;
float daughter_bPwrCurr;
//System management readings
uint32_t userTime;
uint32_t sysTime;
uint32_t idleTime;
uint32_t processes;
uint32_t procs_running;
uint32_t procs_blocked;
//satcomm status
uint32_t rxPackets;
struct RtcTime rtc_time;
uint8_t fswVersion;
uint16_t SP1_Temp; //Temp sensor SP#1 - Bus Manager
uint16_t SP2_Temp; //Temp sensor SP#2 - Bus Manager
uint16_t SP3_Temp; //Temp sensor SP#3 - Bus Manager
uint16_t SP4_Temp; //Temp sensor SP#4 - Bus Manager
uint16_t SP5_Temp; //Temp sensor SP#5 - Bus Manager
int16_t Power0_In; //Power sensor #0 In - Bus Manager
int16_t Power1_Out; //Power sensor #1 Out - Bus Manager
int16_t Power2_In; //Power sensor #2 In - Bus Manager
int16_t Power3_Out; //Power sensor #3 Out - Bus Manager
int16_t Power4_In; //Power sensor #4 In - Bus Manager
int16_t Power5_Out; //Power sensor #5 Out - Bus Manager
int16_t Power6_In; //Power sensor #6 In - Bus Manager
int16_t Power7_Out; //Power sensor #7 Out - Bus Manager
int16_t Power8; //Power sensor #8 - Bus Manager
int16_t Batt0_Voltage; //Battery 0 Voltage - Bus Manager
int16_t Batt0_Current; //Battery 0 Current - Bus Manager
int16_t Batt1_Voltage; //Battery 1 Voltage - Bus Manager
int16_t Batt1_Current; //Battery 1 Current - Bus Manager
int16_t Batt2_Voltage; //Battery 2 Voltage - Bus Manager
int16_t Batt2_Current; //Battery 2 Current - Bus Manager
int16_t Batt3_Voltage; //Battery 3 Voltage - Bus Manager
int16_t Batt3_Current; //Battery 3 Current - Bus Manager
int16_t Batt4_Voltage; //Battery 4 Voltage - Bus Manager
int16_t Batt4_Current; //Battery 4 Current - Bus Manager
int16_t Batt5_Voltage; //Battery 5 Voltage - Bus Manager
int16_t Batt5_Current; //Battery 5 Current - Bus Manager
int16_t Batt6_Voltage; //Battery 6 Voltage - Bus Manager
int16_t Batt6_Current; //Battery 6 Current - Bus Manager
int16_t Batt7_Voltage; //Battery 7 Voltage - Bus Manager
int16_t Batt7_Current; //Battery 7 Current - Bus Manager
int16_t Gyro_Sens_1; //Gyro 1 ????? - ACS Manager
int16_t Gyro_Sens_2; //Gyro 2 ????? - ACS Manager
int16_t Gyro_Sens_3; //Gyro 3 ????? - ACS Manager
int16_t Sun_Sens1_X; //Sun Sensor 1 X axis - ACS Manager (uint???)
int16_t Sun_Sens1_Y; //Sun Sensor 1 Y axis - ACS Manager
int16_t Sun_Sens2_X; //Sun Sensor 2 X axis - ACS Manager (uint???)
int16_t Sun_Sens2_Y; //Sun Sensor 2 Y axis - ACS Manager
int16_t Sun_Sens3_X; //Sun Sensor 3 X axis - ACS Manager (uint???)
int16_t Sun_Sens3_Y; //Sun Sensor 3 Y axis - ACS Manager
int16_t Sun_Sens4_X; //Sun Sensor 4 X axis - ACS Manager (uint???)
int16_t Sun_Sens4_Y; //Sun Sensor 4 Y axis - ACS Manager
int16_t Sun_Sens5_X; //Sun Sensor 5 X axis - ACS Manager (uint???)
int16_t Sun_Sens5_Y; //Sun Sensor 5 Y axis - ACS Manager
int16_t Mag_Sens1_X; //Magnetometer 1 X axis - ACS Manager
int16_t Mag_Sens1_Y; //Magnetometer 1 Y axis - ACS Manager
int16_t Mag_Sens1_Z; //Magnetometer 1 Z axis - ACS Manager
int16_t Mag_Sens2_X; //Magnetometer 2 X axis - ACS Manager
int16_t Mag_Sens2_Y; //Magnetometer 2 Y axis - ACS Manager
int16_t Mag_Sens2_Z; //Magnetometer 2 Z axis - ACS Manager
int16_t Mag_Sens3_X; //Magnetometer 3 X axis - ACS Manager
int16_t Mag_Sens3_Y; //Magnetometer 3 Y axis - ACS Manager
int16_t Mag_Sens3_Z; //Magnetometer 3 Z axis - ACS Manager
int16_t Mag_Sens4_X; //Magnetometer 4 X axis - ACS Manager
int16_t Mag_Sens4_Y; //Magnetometer 4 Y axis - ACS Manager
int16_t Mag_Sens4_Z; //Magnetometer 4 Z axis - ACS Manager
int16_t Torque_Curr_X;
int16_t Torque_Curr_Y;
int16_t Torque_Curr_Z;
uint32_t Depl_Position_Cnt;
uint8_t Panel_Switch_Stat; //Panel Switch Status - Bus Manager
struct extraCheese stringCheese;
float met;
} __attribute__((packed));
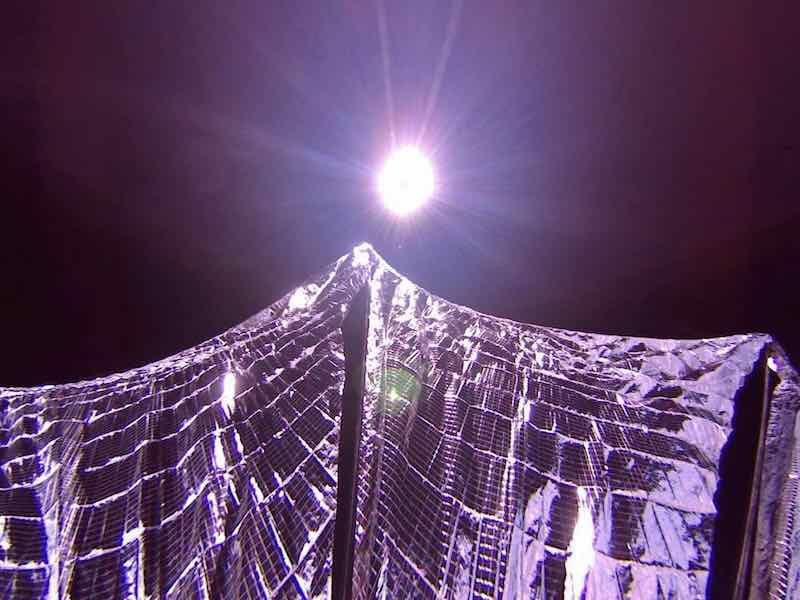
Received image (02-06-2015)

Image from a successfully deployed solar sail
Status
Launched May 20th 2015 with an Atlas V from Cape_Canaveral and active re-entered.
Homepage and other references: