
UniSat-6
GAUSS (La Sapienza University of Rome)
Mission
The satellite is built in 50cm x 50cm x50cm box-shape bus, optimized for piggy-back launch. All instruments are powered by solar cells mounted on the spacecraft body, with maximal electrical power of 30W. Satellite has no on-orbit propulsion or attitude control, and only passive attitude stabilization system based on permanent magnets. Unisat-6 released in orbit four Cubesats, 25 hours and 38 minutes after the separation from the Dnepr Launch Vehicle. This timing was requested in order to comply with the specifications of the launcher and to make the release just a few minutes before being visible from Rome. Those cubesat satellites are 2U ANTELSAT, AeroCube-6, 3U LEMUR-1 and 3U TigriSat.
Orbital parameters
Name UNISAT-6 NORAD 40012 COSPAR designation 2014-033-C Inclination (degree) 97.971 RAAN 131.042 Eccentricity 0.0061375 ARGP 347.505 Orbit per day 14.71505349 Period 1h 37m 51s (97.85 min) Semi-major axis 7 034 km Perigee x apogee 613 x 699 km Drag factor 0.000147630 1/ER Mean Anomaly 12.463
Downlink
437.426 MHz FM 9k6 FSK AX.25
Call
IZ0VXZ
Status
Launched and active. The liftoff of the 20th Dnepr rocket, took place as scheduled on June 19, 2014, at 19:11:11 UTC from an underground silo facility No. 370/13 in the Dombarosvsky ICBM deployment area in southern Russia. The rocket carried the KazEOSat-2 (DZZ-MRES) remote-sensing satellite for the imaging of the Earth surface, which was built by the European consortium Airbus Defense and Space for the government of Kazakhstan and a cluster of 36 secondary payloads for customers from 17 countries, including Deimos-2, Hodoyoshi-3, Hodoyoshi-4, BugSat-1, SaudiSat-4, AprizeSat-9, AprizeSat-10, UniSat-6, Tigrisat, AeroCube 6, ANTELSAT, Lemur-1, BRITE-CA 1, BRITE-CA 2, NanosatC-Br1, Duchifat-1, Perseus-M1, Perseus-M2, QB50P1, QB50P, Tablesat-Avrora, 11 satellites Flock-1c, POPSAT-HIP 1, PACE, PolyITAN, DTUSat-2.

TLE
UNISAT-6 1 40012U 14033C 14273.45644117 .00001867 00000-0 29999-3 0 3400 2 40012 097.9654 166.0022 0059591 231.7916 127.7912 14.71621832 15093
Telemetry
2014-06-20 06:23:37.040 UTC: from IZ0VXZ to II0US (UI, payload: 66 byte) 000 > C0 00 92 92 60 AA A6 40 60 92 B4 60 AC B0 B4 E1 03 F0 55 53 020 > 36 76 0F 00 00 01 38 01 00 28 32 5D 02 96 A7 BA B7 0F 0E 1A 040 > 00 01 00 4D 00 29 FF DB DD 00 B8 01 0F 01 15 9F AE 2F 40 7B 060 > 8D 3E 8E 00 58 00 91 0E 83 0E AA 0E 61 00 39 01 49 01 0B 00 080 > 08 00 00 02 89 C0 2014-06-20 06:24:16.760 UTC: from IZ0VXZ to II0US (UI, payload: 66 byte) 000 > C0 00 92 92 60 AA A6 40 60 92 B4 60 AC B0 B4 E1 03 F0 55 53 020 > 36 7A 0F 00 00 01 38 01 00 74 CE 5D 02 BE A7 BA B7 0F 0E F0 040 > FF 3F 00 C7 FF 7B FE 7C 01 EA FF 03 01 15 9E AC 30 40 78 8D 060 > 3E 6B 00 4C 00 50 05 45 05 6C 05 01 00 31 04 A5 01 11 00 08 080 > 00 00 02 19 C0
struct unisat6_beacon02
{
uint8_t syncPacket[3]; //It contains the bytes: U S 6
uint16_t packetIndex; //Index of packet
uint16_t groundIndexAck; //ACK to ground commands
uint8_t packetType; //value "1" for beacon02
uint8_t payloadSize;
uint16_t payloadSize;
uint32_t uptime; //Milliseconds since last reboot
uint32_t unixTime; //Seconds since 1970
int8_t tempMCU; //Temperature CPU
int8_t tempFPGA; //Temperature FPGA
int16_t magnetometer[3]; //Magnetometer X, Y, Z readings
int16_t gyroscope[3]; //Gyroscope X, Y, Z readings
uint16_t cpuCurrent;
int8_t tempRadio;
uint8_t payloadReserved[2];
uint8_t temperatureBottom;
uint8_t temperatureUpperPart;
uint8_t payloadReserved;
uint16_t eps_Vbat; //Battery voltage in mV
uint16_t eps_currentSun; //Current from solar panels in mA
uint16_t eps_currentOut; //Current comsuption by the satellite
uint16_t eps_Vpanel01; //Voltage in mV from bottom panels
uint16_t eps_Vpanel02; //Voltage in mV from panels B & D
uint16_t eps_Vpanel03; //Voltage in mV from panels A & C
uint16_t eps_current01; //Current in mA from bottom panels
uint16_t eps_current02; //Current in mA from panels B & D
uint16_t eps_current03; //Current in mA from panels A & C
uint16_t eps_batTemperature; //Temperature of the batteries
uint8_t payloadReserved;
uint16_t satelliteErrorFlags;
uint8_t satelliteOperationStatus;
uint8_t crc; //Last 8 bits of a 16bit CRC-CCITT-BR
}
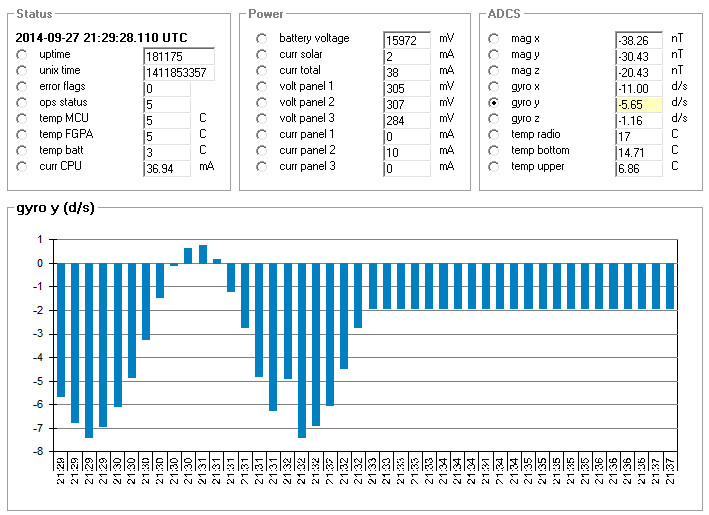
Decoded received data with the decoder from DK3WN
UNISat-6 video over Europe:
This video was taken by the UNISAT-6 satellite on the 27th of July 2014 starting at around 9:22 UTC.
The satellite was rotating at 6 rpm. The video is accelerated aproximately by x2 and it is composed of pictures taken aproximately every 1.1s. The camera was never intended to make video only pictures, in this case the camera was set to its lowest resolution possible (160px) in order.
Homepage and other references:
Gauss UniSAT-6 website.